- 최적설계 연구실
- 트라이볼로지 연구실
- 소성가공 CAE 연구실
- 열공학 실험실
- 전산유체공학연구실
- 시스템 제어실험실
- 기계시스템설계실험실 (Laboratory name: Mechanical System Design Laboratory.)
- 혁신설계 실험실 (Innovative Design Lab.)
- 복합재 구조 연구실 (Composite structures Lab.)
- 실험유체역학연구실 (Experimental Fluid Mechanics Lab.)
- 유변학 및 재료가공 연구실 (Rheology and Materials Processing Lab.)
- 스마트 매뉴팩처링 연구실 (Smart Manufacturing Lab.)
- 차세대 에너지 환경 기계 연구실 (Next-generation Energy and Environmental Devices Lab.)
- 표면공학 및 에너지디바이스 연구실
- 지능 및 상호작용 로보틱스 연구실
- 전산 음향 및 진동 연구실(Numerical Acoustic and Vibration Lab.)

Research Area
- Attitude Motion Control of Vehicle
- Electric Vehicle Control System
- Mechanism Design, Dynamics and Control
- Preview Control and Predictive Control
- Autonomous Drive Control System
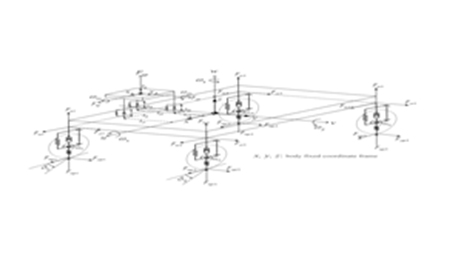
ROAD DISTURBANCE ESTIMATION FOR THE OPTIMAL PREVIEW CONTROL OF ACTIVE SUSPENSION SYSTEMS BASED ON TRACKED VEHICLE MODEL
-

- Full Tracked Vehicle Model
-
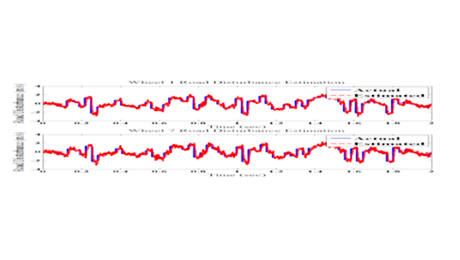
- Road Disturbance Estimation
COMBINED CONTROL EFFECTS OF BRAKE AND ACTIVE SUSPENSION CONTROL ON THE GLOBAL SAFETY OF A FULL CAR NONLINEAR MODEL
-
- Full Vehicle Model
-
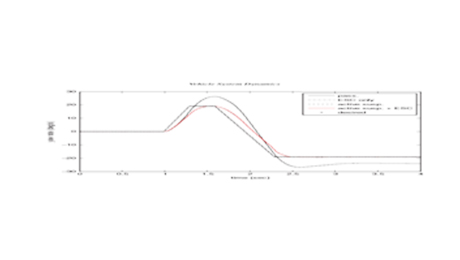
- Vehicle Yaw Rate Control During An Obstacle Avoidance
최근 업데이트 일시 : 2021/05/28 18:13:39